入部研の大学院進学する卒研生が2024年3月14日に開催された 日本機械学会関西支部2023年度関西学生会卒業研究発表後援会で卒業研究の内容を発表しました.発表内容は以下の通りです.
・14AM1-5 仲川 友稀,SMA アクチュエータを用いた柔軟関節の開発
・14AM2-1 近棟 直人,HOT 患者を支援するロボティックカートの設計
・14AM2-2 稲木 湧大,動力学を表現可能な教育用マニピュレータの開発
・15PM1-1 藤田 直希,補償光学装置の制御系シミュレータ開発
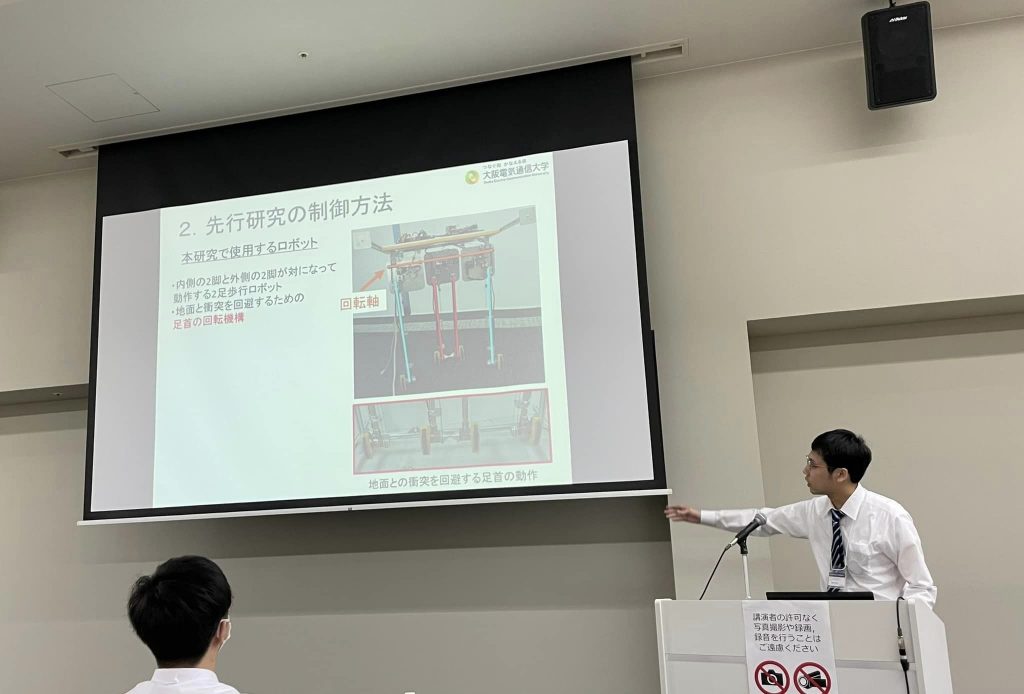
・16AM2-4 中川 陸斗,リミットサイクル歩行機械の足部機構の検討
・18PM2-4 林 群富,リミットサイクル歩行機械に取り付ける足の研究 -生物模倣でヒトの足を再現-