
概要
本研究室では制御工学を基本とするメカトロニクス技術によって,世の中で「今まさに必要とされる」または「少し先の将来に必要とされる」ロボットやメカトロニクス機器を実現するための研究を行っています. 研究を進めるときの柱となるのは,
ものが動くことを良く知るための「力学」
実際にものを動かす機械を設計するための「機械工学」
機械を動かすための回路を設計するための「電気・電子工学」
電気・電子回路によって動く機械を良く動かすための「計測・制御工学」
制御工学の知識を現実の世界で実現するための「コンピュータ工学」
といった学問です. しかし,これ以外にも必要に応じて様々な知識を学びながら研究をおこないます.
研究テーマ
・脚歩行ロボットの設計論に関する研究
脚歩行ロボットの研究が進んだ現在,自在に歩く2脚・4脚・6脚などの歩行ロボットを多く見ることができます.これらの歩行ロボットの多くは「倒れないように歩行動作を【制御する】」ことに注力することで,その動作を実現しています.このように【制御する】アルゴリズムと同時に,【制御される】ロボットハードウェアの両方を同時に考えて設計することで,人間や動物のように滑らかに動き,消費エネルギーも抑えられる歩行ロボットが実現できると考えられています.本研究室では,生物のように滑らかでエネルギー消費が小さくなる歩行動作の実現を目的として,【制御される】脚ロボットのハードウェアをどのように設計すれば良いのかという問題を明らかにするために「受動的動歩行」を行う歩行ロボットの研究を行っています.
・HOT患者の外出支援用ロボティックフォロワの実用化研究
さまざまな肺疾患のために体に酸素を取り入れる能力が衰えた患者さんは,高い濃度の酸素を常に呼吸する必要があります(在宅酸素療法:Home Oxygen Therapy :HOTと言います).そのような患者さんが日常生活を送るためには,外出時に酸素ボンベや酸素発生機を携帯し,そこからの高濃度な酸素を呼吸することが必要です.ところで現在使用されている携帯用酸素機器一式は5㎏弱の質量となり,体力が衰えがちな患者さんの負担になっています.本研究室では,移動中の患者さんの側に連れそって携帯用酸素機器を運ぶことができる人間追従型ロボット(ロボティックフォロワ;Robotic Follower)の実現のための研究を行っています.
・人間と同等の表現力を有するロボットマニピュレータの研究
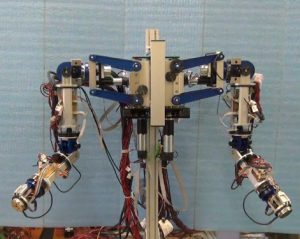
少子高齢化にともなう労働人口の減少により,家庭内にロボット機器が入ってくることが予想されています.その際,人間と同様の作業をすることや言語外のコミュニケーションとしてのジェスチャー動作によるコミュニケーションを行うなど,ロボットマニピュレータの果たす役割が多くなってくると考えられます.本研究室では,このようにロボットマニピュレータを動作させるための要素技術の研究として人間の肩甲骨の動きに着目し,人間のように肩が大きく動くロボットを開発しました.そのロボットを使用して,どのようにして動作(モーション)を作成するか,どのように制御するのか,といったことをテーマに研究しています.
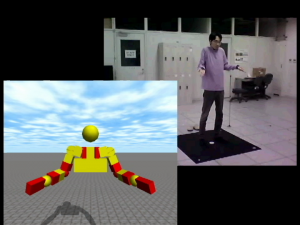
左図:3Dモーションキャプチャにより人間の動作を抽出する様子
右図:ロボットマニピュレータにより人間の動作を再現
・天体観測装置のための極限補償光学装置の実用化研究
我々の太陽系から14ー15光年ほど離れたところにハビタブル・ソーンという地球と似た生命が存在できる惑星系の空間があります.これらの惑星を地上の望遠鏡で観測すると,上空の大気の乱れのため観測した星の光も乱れてしまいます.この星の乱れを補正するために補償光学という技術を使用します.本研究室ではせいめい望遠鏡に搭載される極限補償光学装置の開発に取り組んでいます.この装置は,国際プロジェクトで開発されている口径30mの大型望遠鏡TMT(Thirty Meter Telescope)の第二期観測装置の候補としても開発が進んでいます.

・ラズベリーの自動収穫システムの研究
農業人口の減少と高齢化対策として,農作業の自動化が必要だと言われています.本研究室では,本学の工学部環境科学科齊藤研究室と共同で植物工場内でのラズベリー自動収穫ロボットシステムを開発しています(本学のベリーベリープロジェクトにも参画しています).本研究室で提案しているロボットシステムは,1)ラズベリー果実の収穫時期を機械学習を用いて推定する認識装置,2)ラズベリー果実を傷つけることなく収穫するロボットハンド,3)ロボットハンドが植物工場内で自在に移動できる移動システム,4)ラズベリー果実の生育状況を観察し収穫計画を立てて収穫するIoT管理システム,で構成されています.これらの技術の実用化に向けて研究開発を進めています.
